Dutch scientists built a brainless soft robot that runs on air
Most robots rely on complex control systems, AI-powered or otherwise, that govern their movement. These centralized electronic brains need time to react to changes in their environment and produce movements that are often awkwardly, well, robotic.
It doesn’t have to be that way. A team of Dutch scientists at the FOM Institute for Molecular and Atomic Physics (AMOLF) in Amsterdam built a new kind of robot that can run, go over obstacles, and even swim, all driven only by the flow of air. And it does all that with no brain at all.
Sky-dancing physics
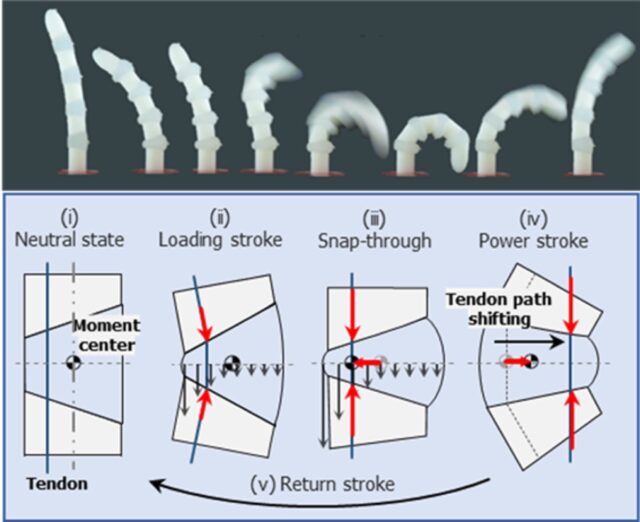
“I was in a lab, working on another project, and had to bend a tube to stop air from going through it. The tube started oscillating at very high frequency, making a very loud noise,” says Alberto Comoretto, a roboticist at AMOLF and lead author of the study. To see what was going on with the tube, Comoretto set up a high-speed camera and recorded the movement. He found that the movement resulted from the interplay between the air pressure inside the tube and the state of the tube itself.
When there was a kink in the tube, the increasing pressure pushed that kink along the tube’s length. That caused the pressure to decrease, which enabled a new kink to appear and the cycle to repeat. “We were super excited because we saw this self-sustaining, periodic, asymmetric motion,” Comoretto told Ars.
The first reason for Comoretto’s excitement was that the flapping tube in his lab was driven by the kind of airflow physics that Peter Marshall, Doron Gazit, and Aireh Dranger harnessed to build their famous dancing “Fly Guys” for the Olympic Games in Atlanta in 1996. The second reason was that asymmetry and periodicity he saw in the tube’s movement pattern were also present in the way all living things moved, from single-celled organisms to humans.
Dutch scientists built a brainless soft robot that runs on air Read More »